ボトムボディーの組み立て
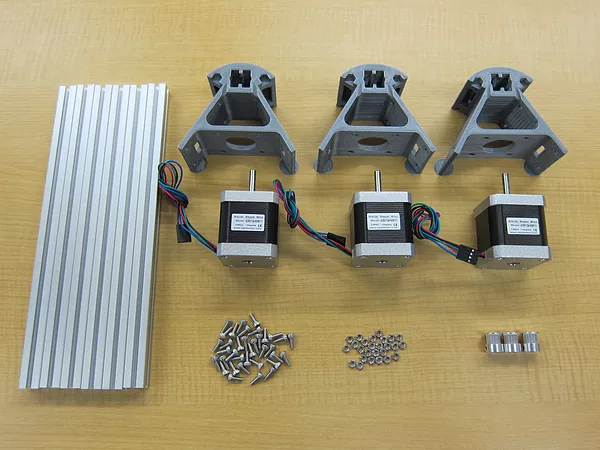
以下の部品を準備します。
- アルミフレーム(小):6本
- モーターフレーム:3個
- モーター:3個
- M3-8ボルト:36個
- M3ナット:24個
- プーリー:3個
モーターフレームの丸い部分(サポート)を取ります。

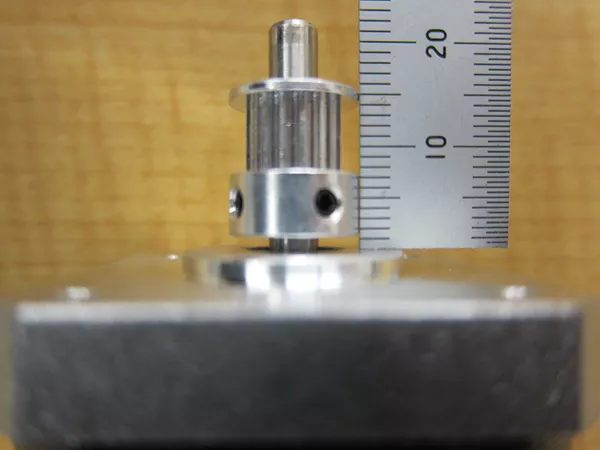
下の写真の方向に、モーターの軸にプーリーを差し込みます。モーターとプーリーの間に1mm程度の隙間が空く様にして、2つの止めネジを両方とも締めます。
注意:プーリーはアルミ製ですので、きつく締め過ぎるとネジが切れて止まらなくなります。しかし、緩すぎると空回りしてしまいますので、注意が必要です。

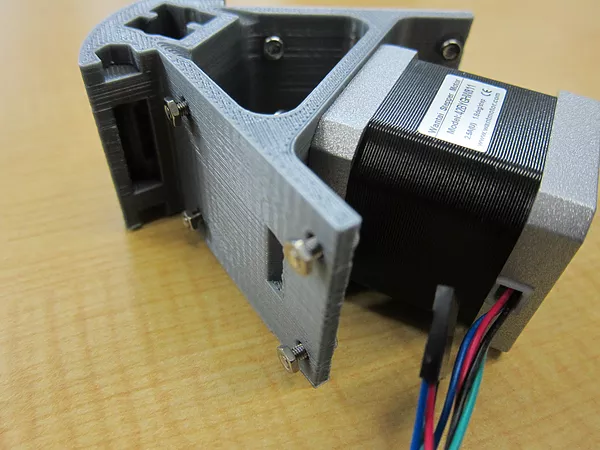
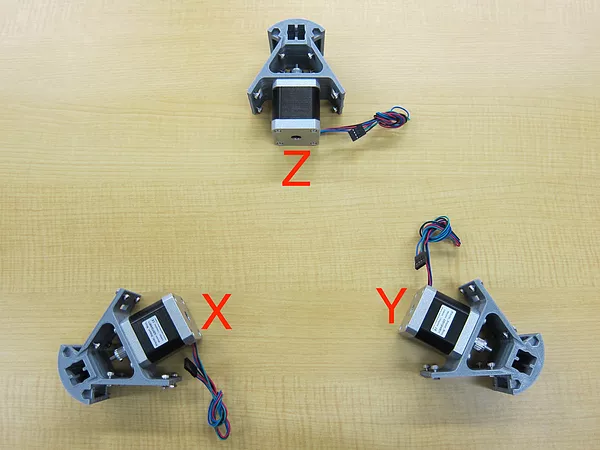
モーターフレームにモーターをM3-8ボルトで締めます。モーターの左側にケーブルが出るようにします。またモーターフレームのザラザラ面が上、ツルツル面が下になるようにします。1個目を作製し、分かり易いところに「X」と書きます。全く同じ要領で2個目を作製し、「Y」と書いておきます。

3個目はモーターの右側にケーブルが出るようにします。作製後、「Z」と書いておきます。

モーターフレームの側面の穴にM3-8ボルトとM3ナットを取り付けます。ナットはボルトの先端が少し出るくらいの深さまで入れます。モーターフレーム1個当たり8箇所、各モーターフレームに取り付けます。
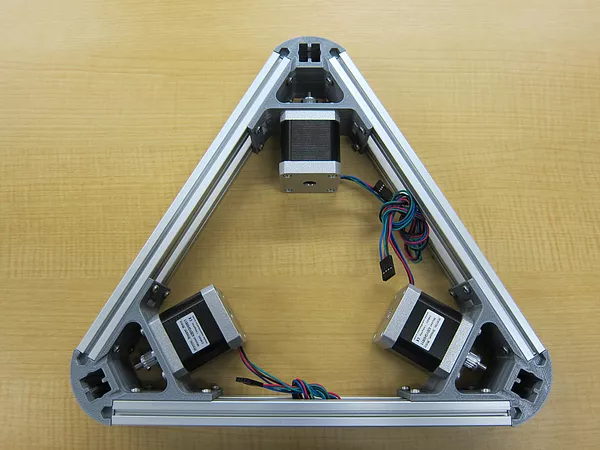
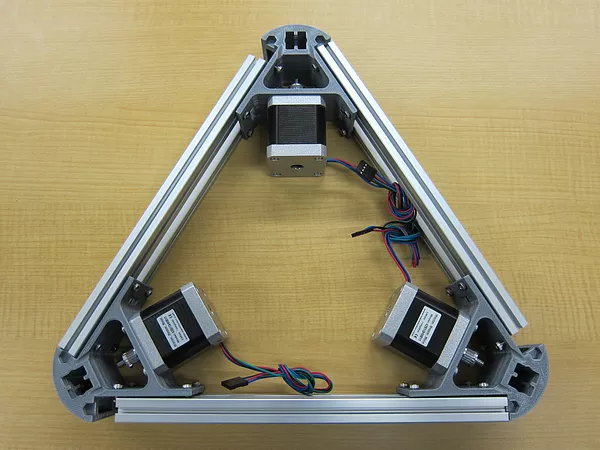
下の写真の様に、三角形になるようX、Y、Zの位置にモーターフレームを置きます。ザラザラ面が上側、ツルツル面が下側にします。
アルミフレーム差し込みます。写真のように各モーターフレームの片側(右側)に上下2本装着します。
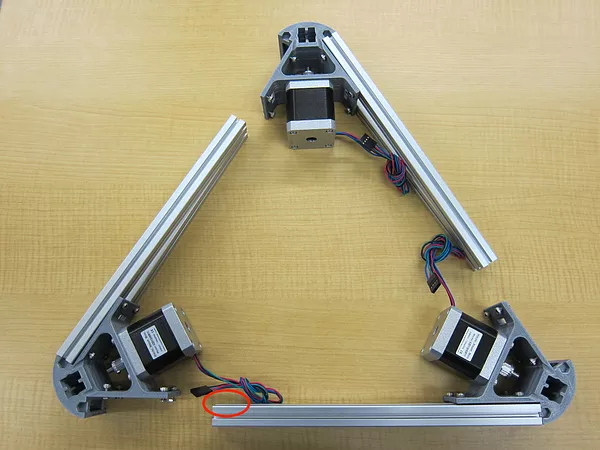
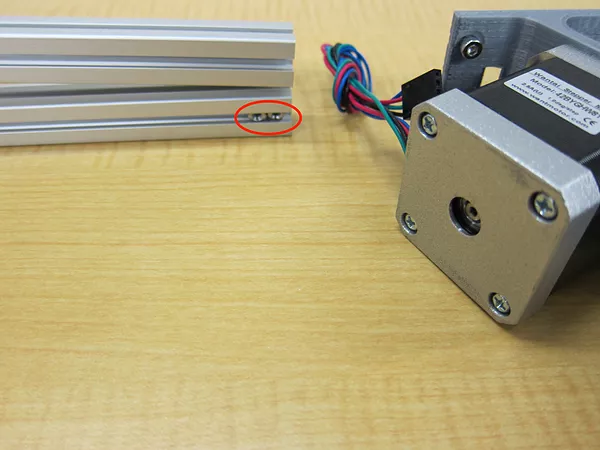
上図赤丸の部分について、下側のアルミフレームの内側の溝にM3ナットを2個入れます。これは後からArduinoマウントを装着するために必要です。組み立て後にナットを入れることは出来ないので注意して下さい。
三角形を徐々に狭めていき、相手のモーターフレームの手前側のナットに通します。
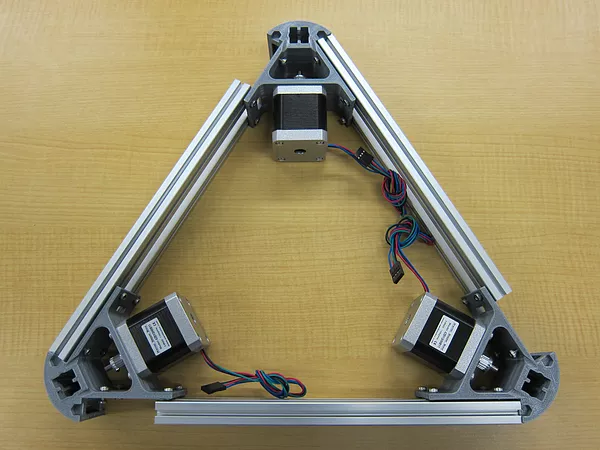
さらに三角形を狭めていき、相手のモーターフレームの奥側のナットの手前までアルミフレームがくるようにします。
この状態で、アルミフレームを動かして奥側のナットに通します。
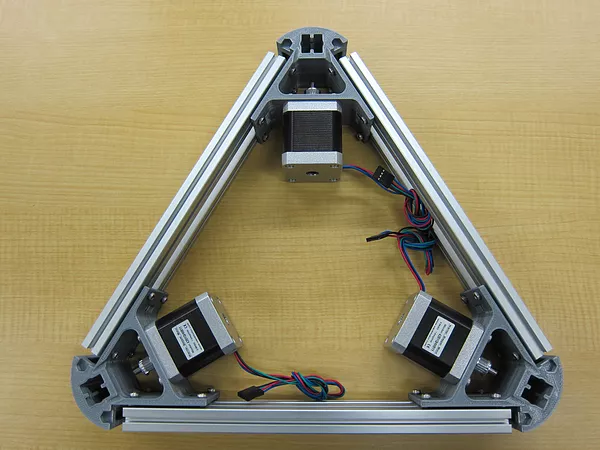
すべてのナットが通ったら、ゆっくり全体を狭めて隙間のない状態にします。あとはナットを全て締めて下さい。